
A Holonic Construction Management System for the Efficient Implementation of Building Energy Renovation Actions
 , , , , and
, , , , and
Abstract
:1. Introduction
1.1. Traditional Construction Project Planning and Scheduling
1.1.1. Theoretical Approaches
1.1.2. Experimental Approaches and Commercial Tools
1.2. Holonic Construction Management
1.3. Research Questions Covered by This Study
2. Materials and Methods
2.1. The Concept Development
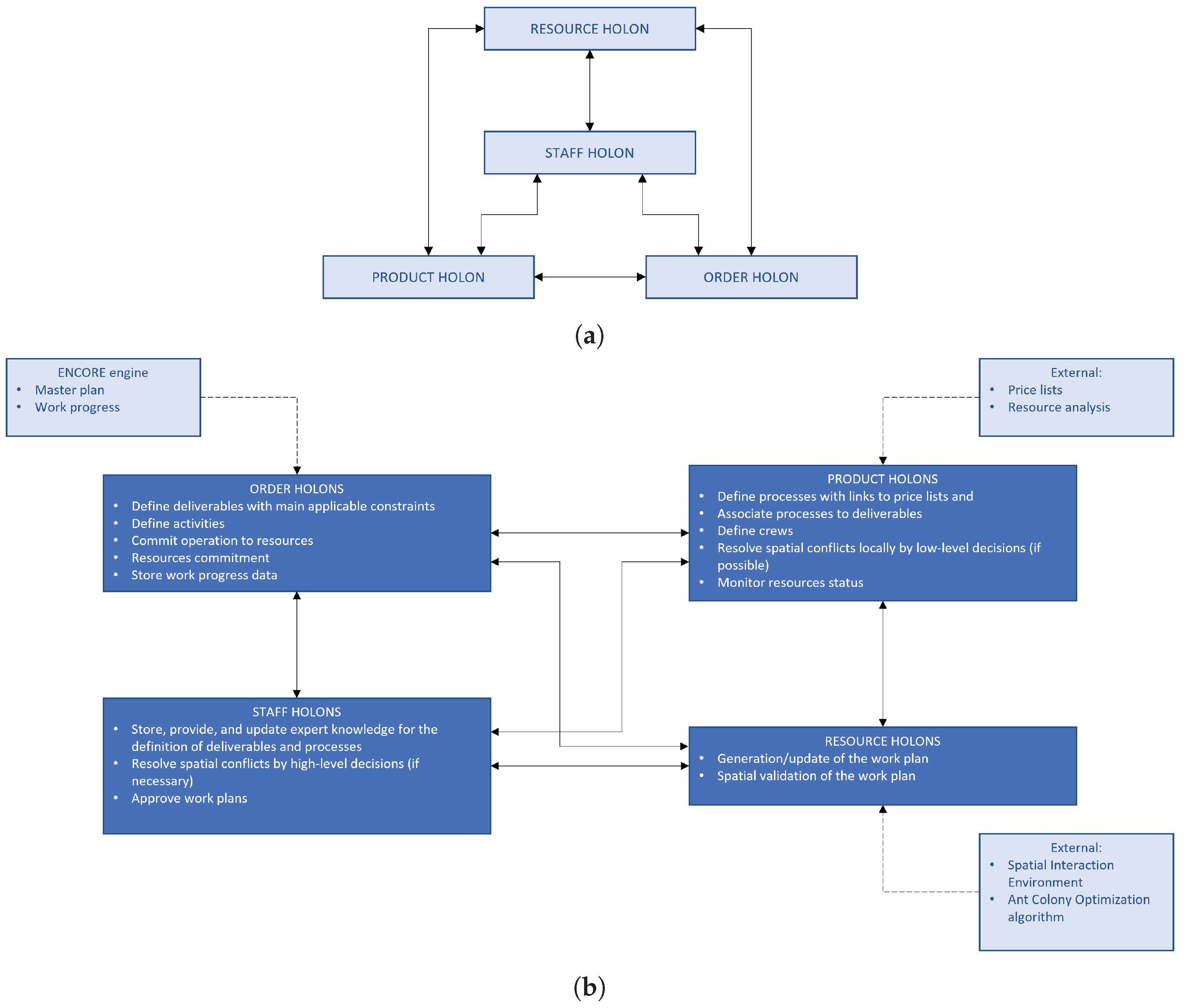
2.2. The Holonic Management of Construction Projects
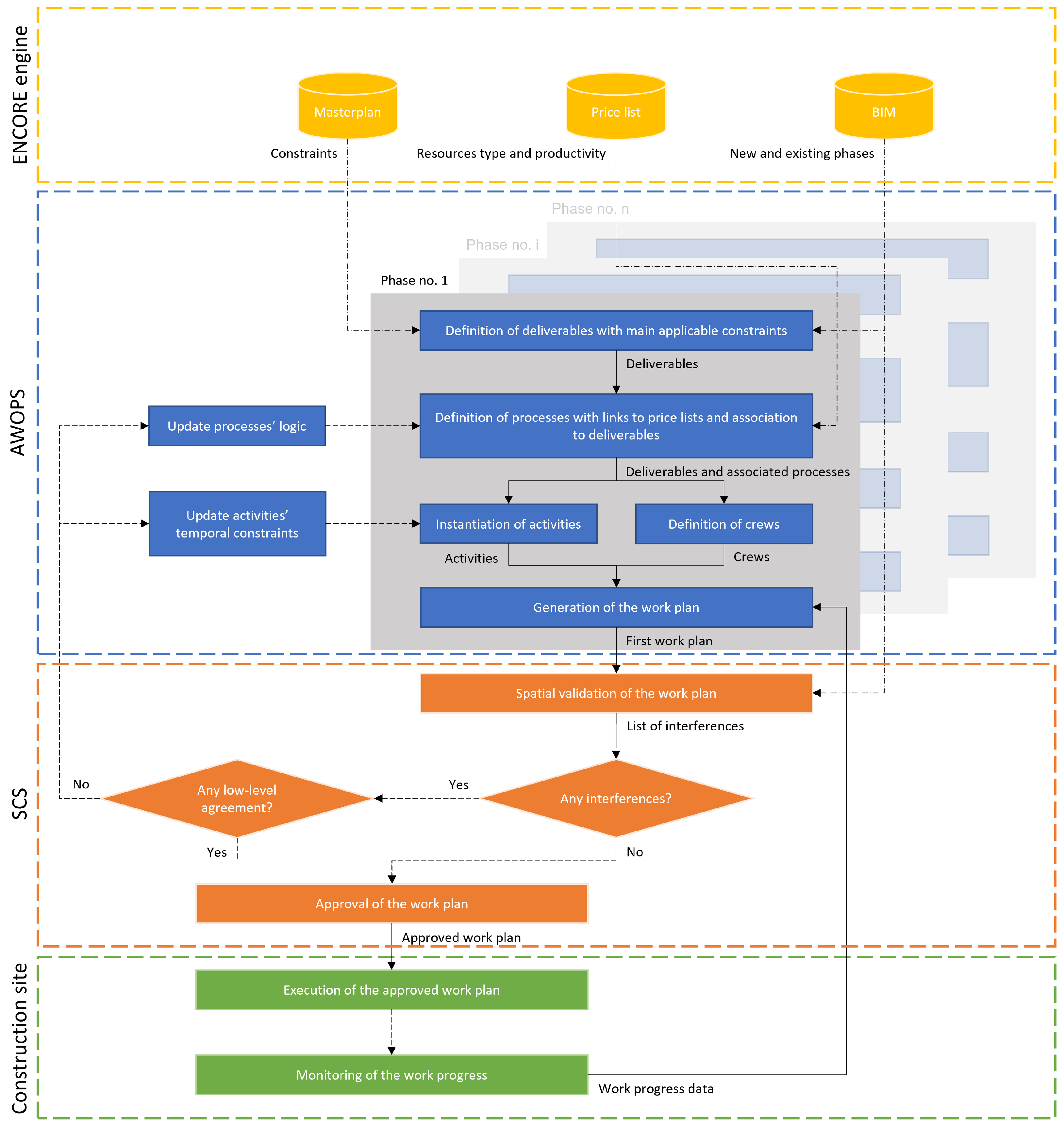
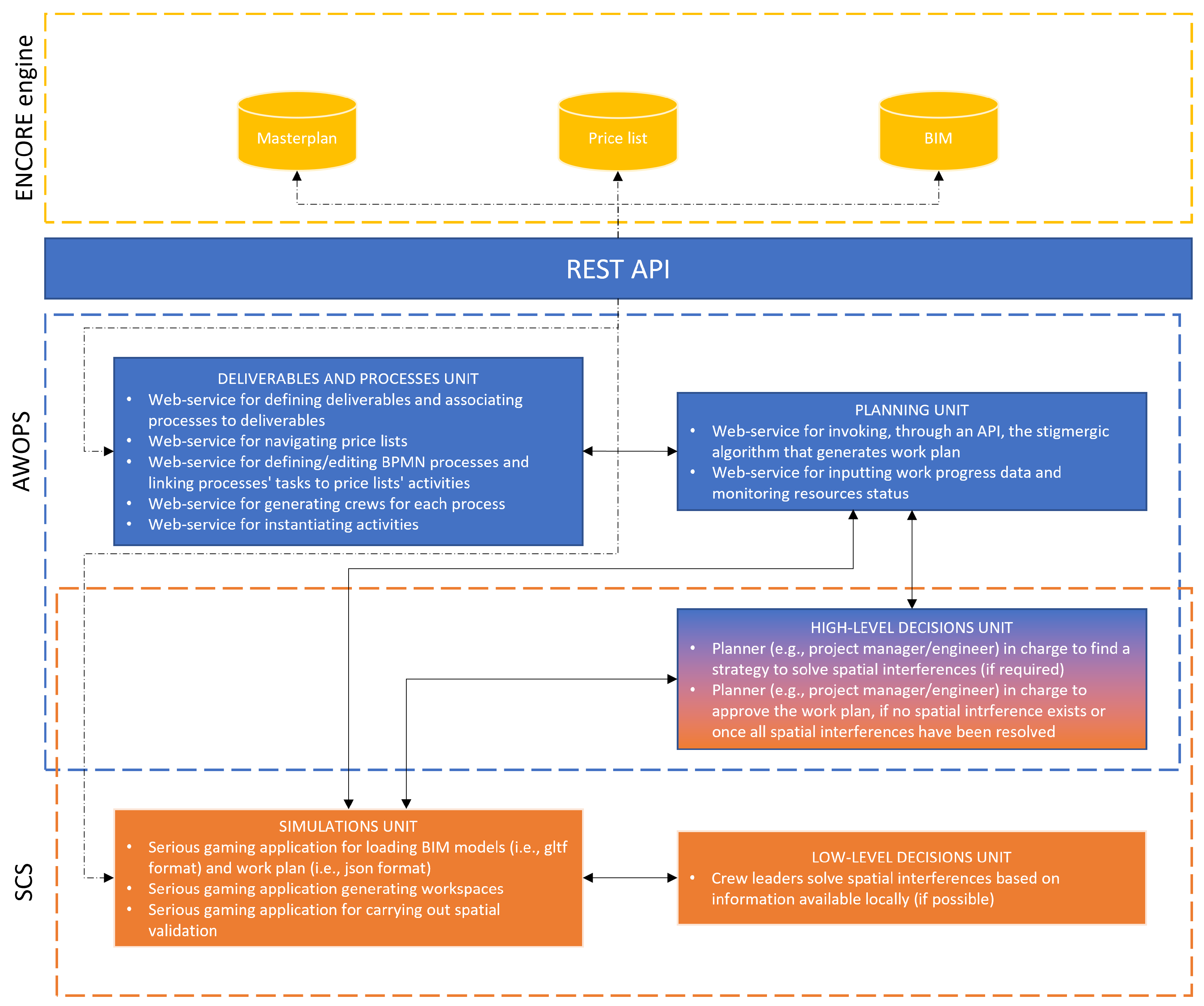
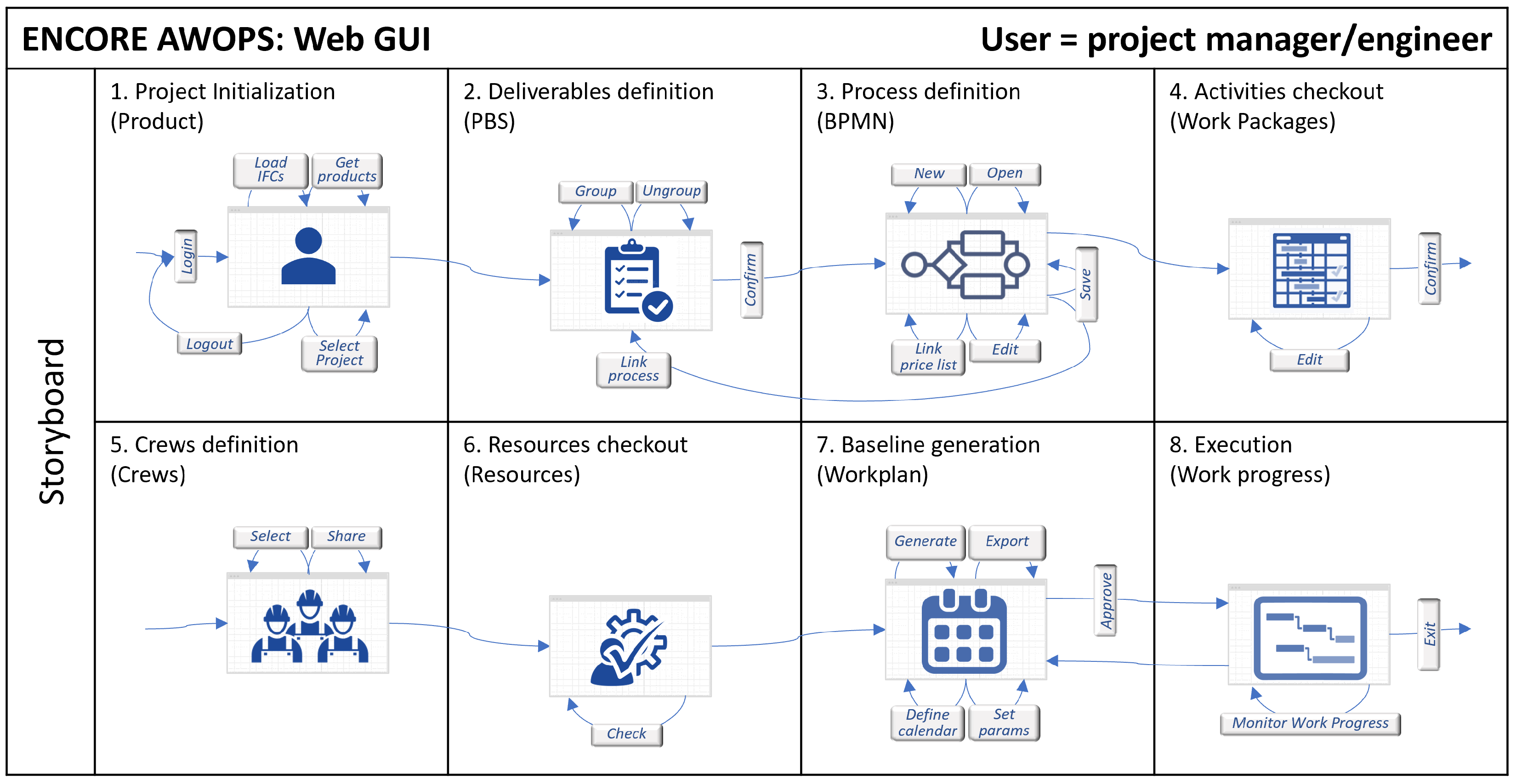
2.3. The Proposed Replanning Workflow: Technical Implementation
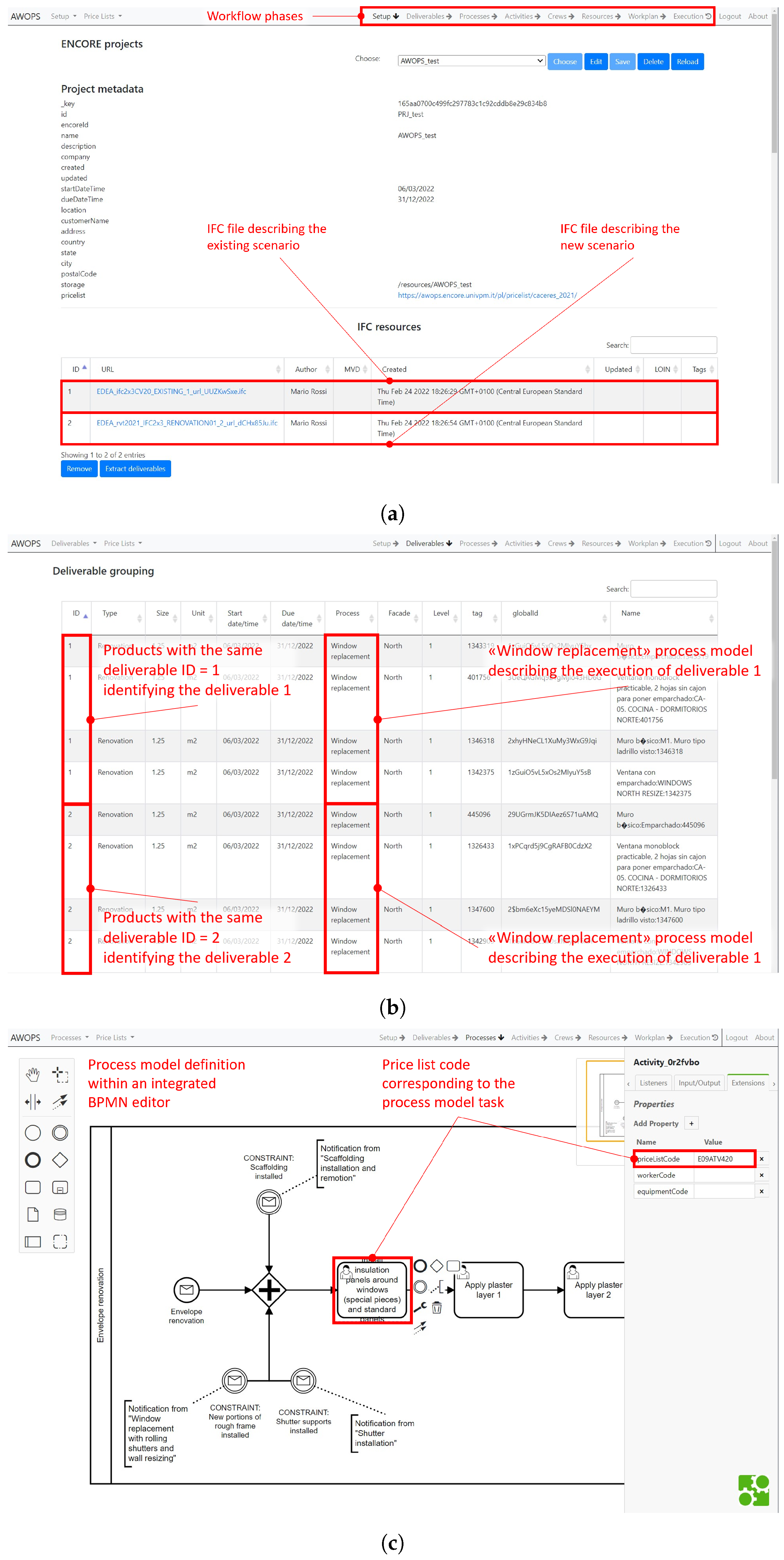
2.3.1. Project Initialization and Deliverables Definition
2.3.2. Processes Definition
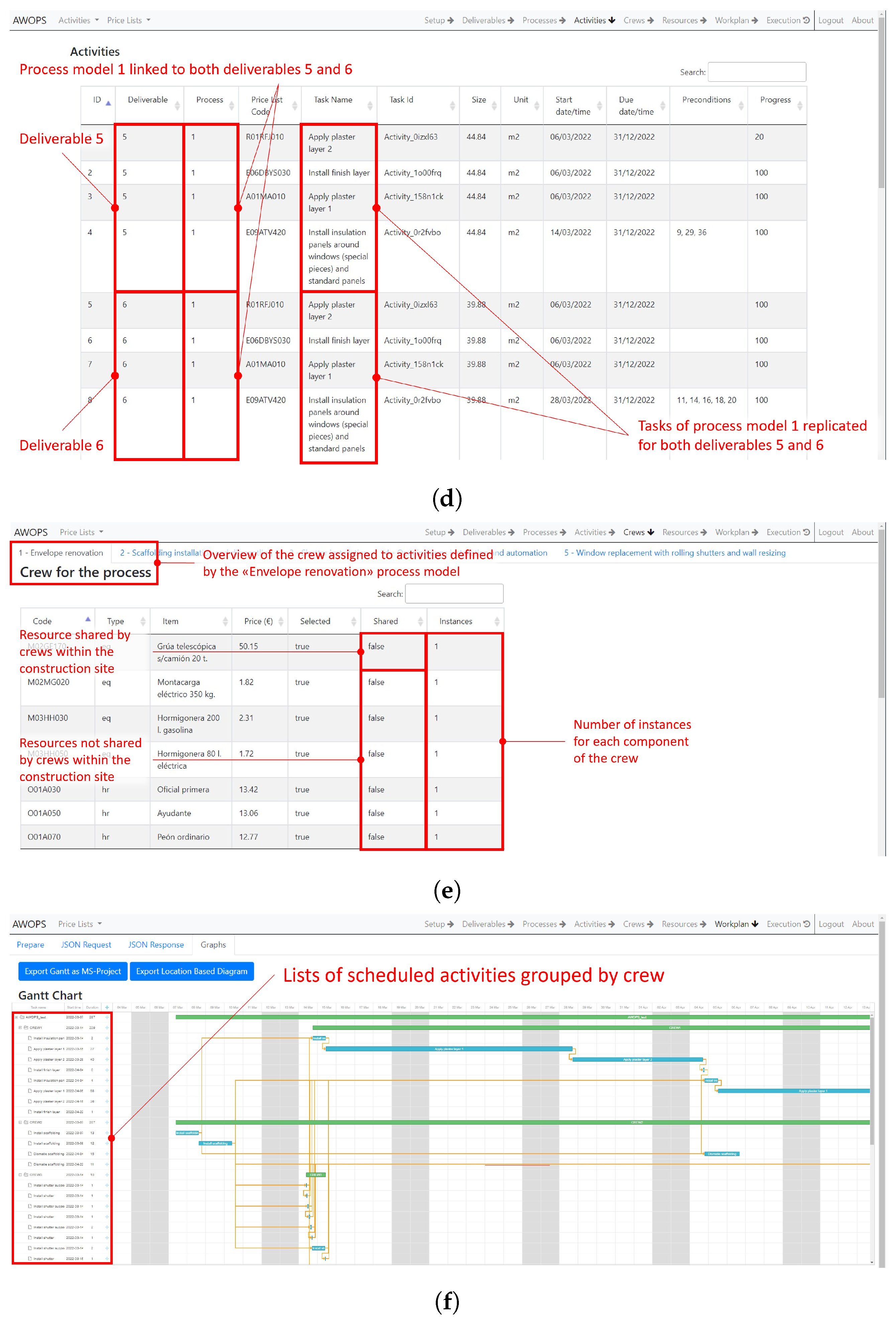
2.3.3. Activities Checkout
2.3.4. Crew Definition and Resources Checkout
2.3.5. Baseline Generation
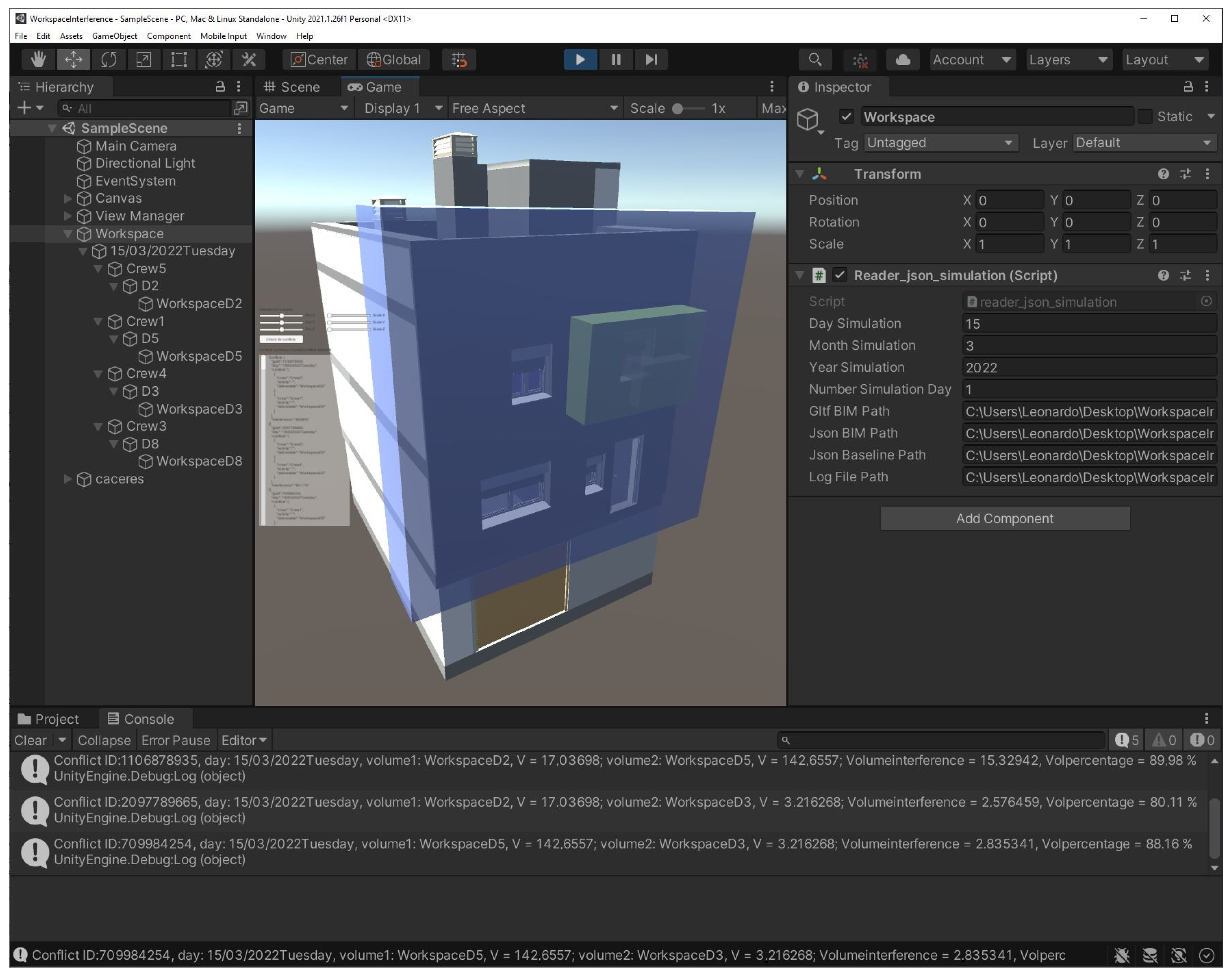
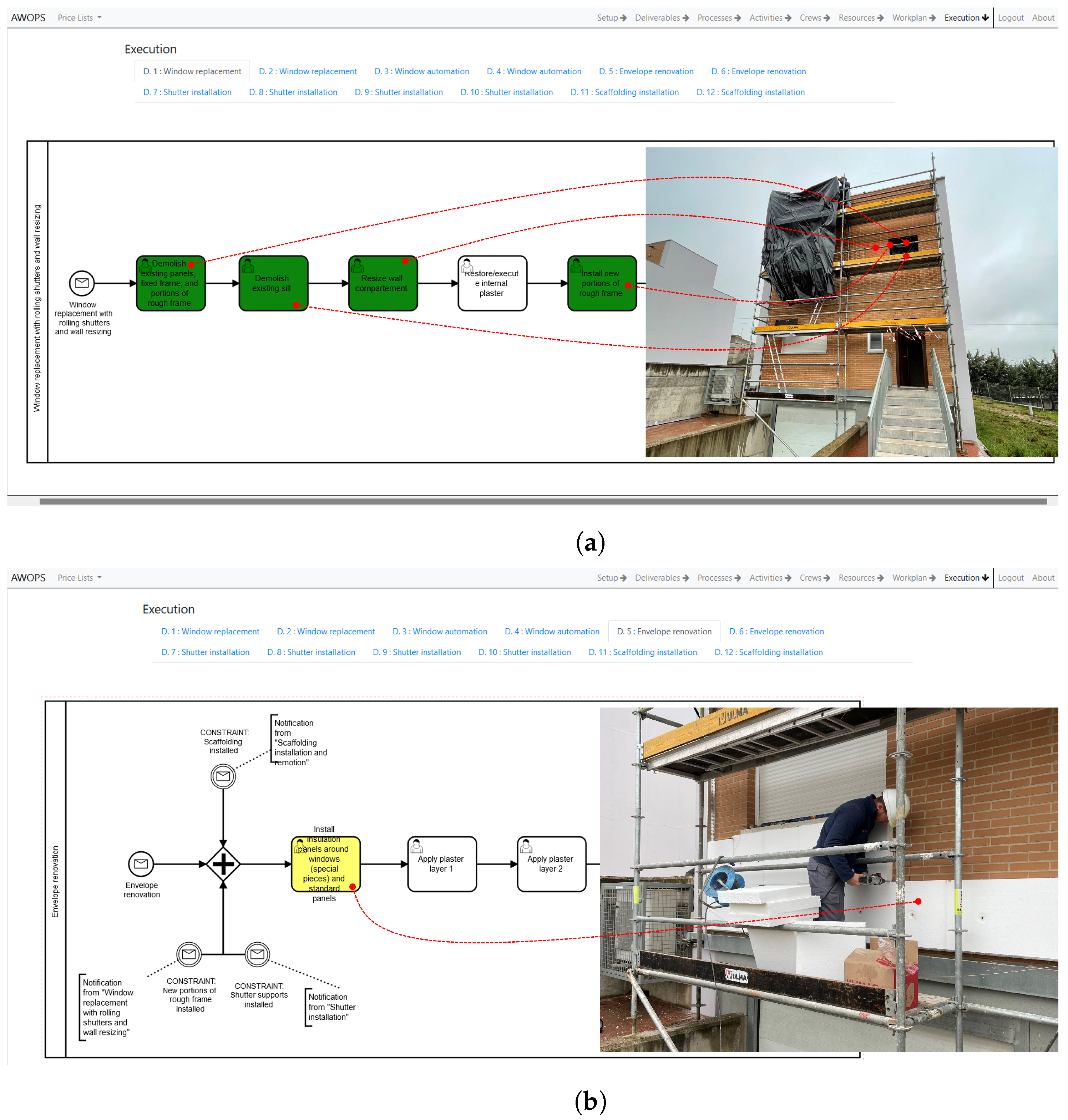
2.3.6. Spatial Simulation of the Work Plan
2.3.7. Execution
2.4. Performance Indicators
- A.1
- The first one is determined by asking the supervisor, who assisted in all the replanning actions, to answer the following question with reference to the Likert scale: “How smooth is the pipeline to generate and download the schedule?” In the Likert scale adopted in this study, ranging from 1 to 4, a greater value corresponds to a higher level of satisfaction.
- A.2
- The second one, given the cost function values generated by AWOPS for each replanning of works, stores their variation from the baseline across time. It must be specified that the cost function values are computed with reference to the totality of works, regardless of progress.
- B.1
- The first one is determined by asking the supervisor who assisted in all the replanning actions to answer to the following question with reference to the aforementioned Likert scale: “Were crew leaders able to resize workspaces and solve clashes locally in the SCS”
- B.2
- The second one calculates the ratio between the number of spatial conflicts detected by SCS and the maximum number of potential occurrences.
- B.3
- The third one is determined by asking the supervisor who assisted in all the replanning actions to answer to the following question with reference to the aforementioned Likert scale: “How easy is it to update work progress in the web service?”
- B.4
- The fourth one is determined by asking the supervisor who assisted in all the replanning actions to answer to the following question with reference to the aforementioned Likert scale: “How informative is the visualization of the work progress in the web service?”
3. Experiments Design and Results
3.1. Design of Experiments
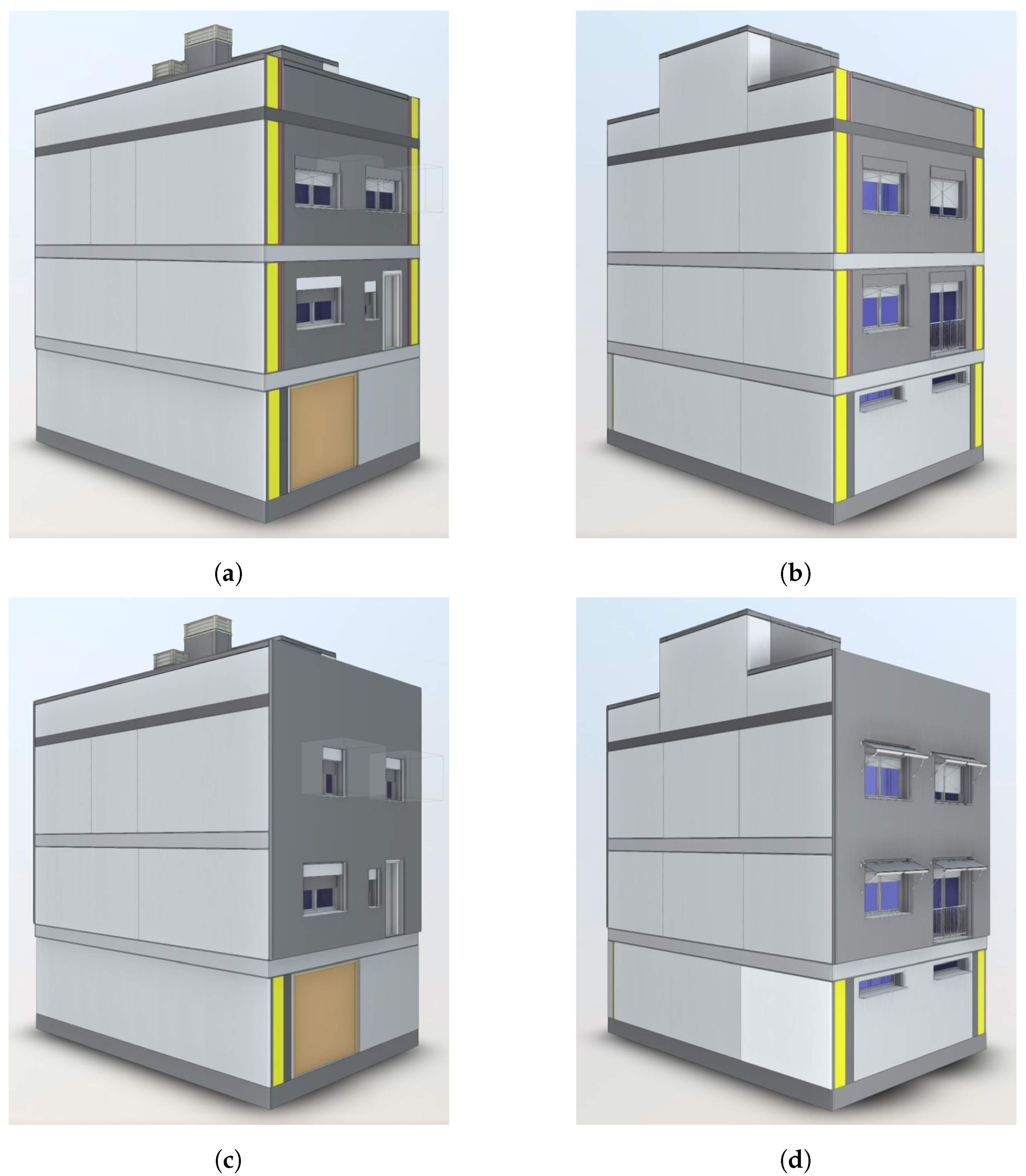
3.1.1. The Renovation Project
3.1.2. The Work Commitment
3.2. Experiment Conduction
3.2.1. Generation of the Baseline on Day 0
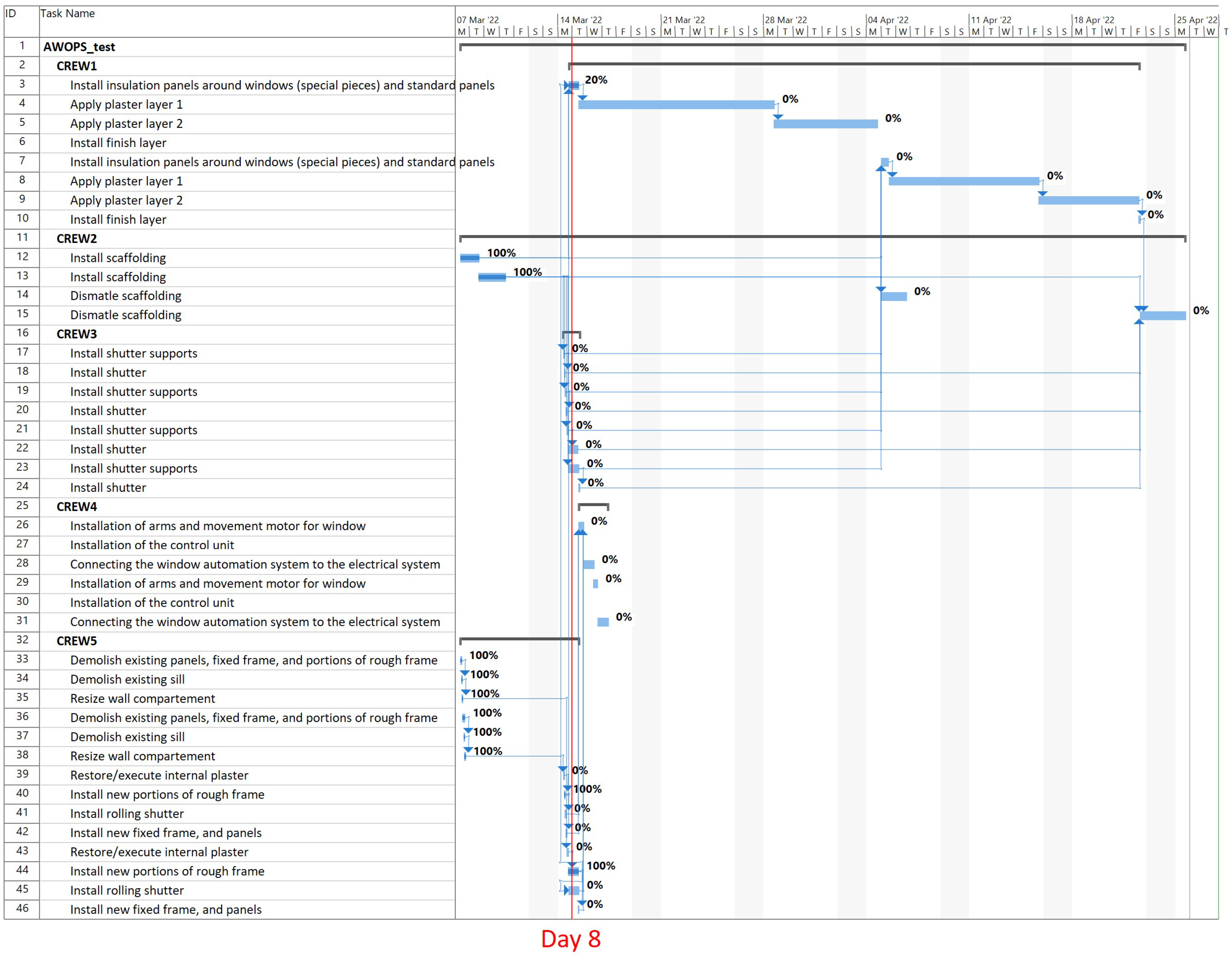
3.2.2. Replanning on Day 8
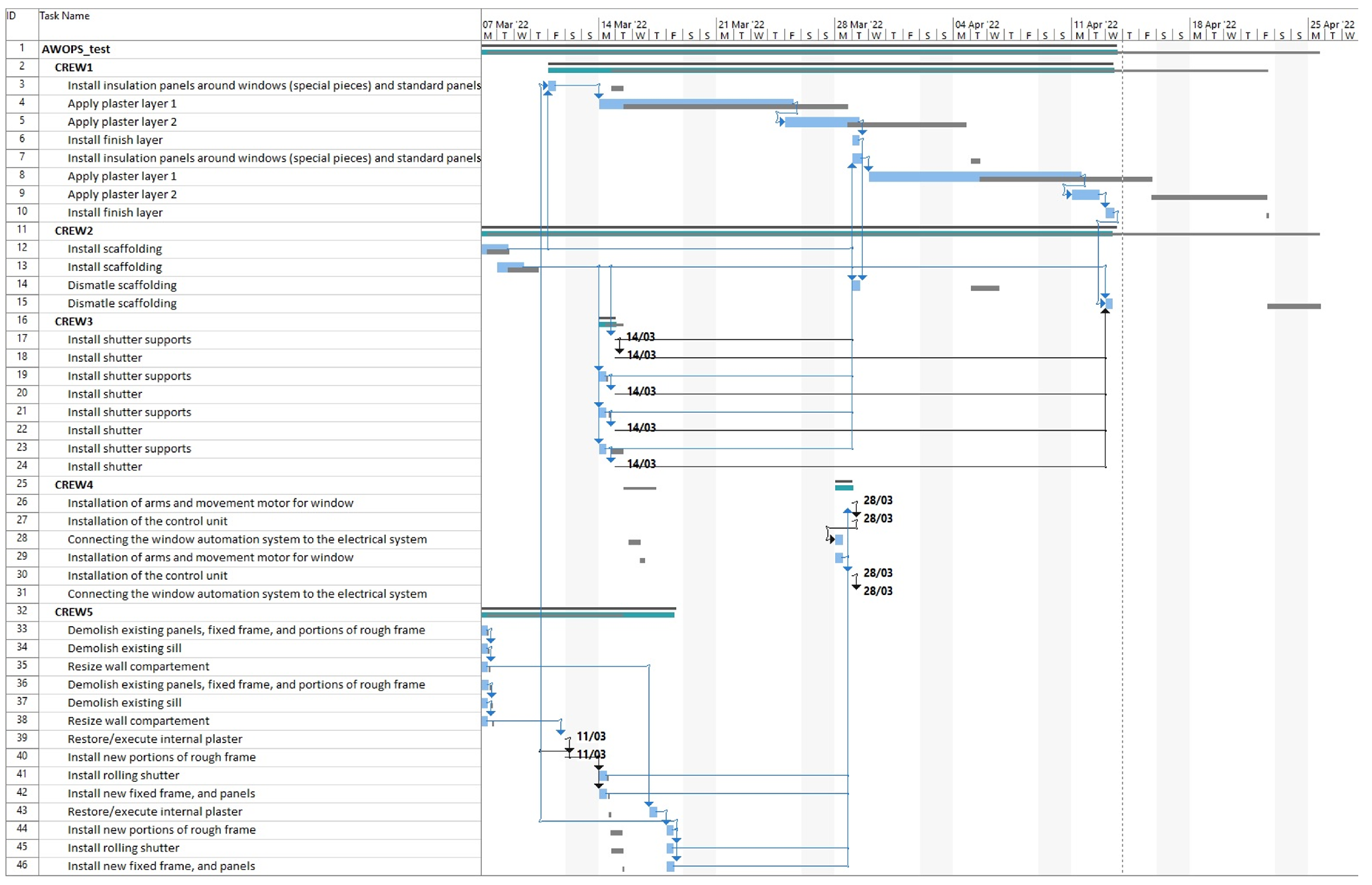
3.2.3. Replanning on Day 32
3.3. Results of the Assessment
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sacks, R.; Radosavljevic, M.; Barak, R. Requirements for building information modeling based lean production management systems for construction. Autom. Constr. 2010, 19, 641–655. [Google Scholar] [CrossRef]
- Zhou, W.; Zhao, T.; Liu, W.; Tang, J. Tower crane safety on construction sites: A complex sociotechnical system perspective. Saf. Sci. 2018, 109, 95–108. [Google Scholar] [CrossRef]
- Dallasega, P.; Marengo, E.; Revolti, A. Strengths and shortcomings of methodologies for production planning and control of construction projects: A systematic literature review and future perspectives. Prod. Plan. Control. 2021, 32, 257–282. [Google Scholar] [CrossRef]
- Gorod, A.; Hallo, L.; Statsenko, L.; Nguyen, T.; Chileshe, N. Integrating hierarchical and network centric management approaches in construction megaprojects using a holonic methodology. Eng. Constr. Archit. Manag. 2021, 28, 627–661. [Google Scholar] [CrossRef]
- Cilliers, P. Complexity & Postmodernism; Routledge: London, UK, 1998. [Google Scholar] [CrossRef]
- Garcia-Lopez, N.P.; Fischer, M. A Construction Workflow Model for Analyzing the Impact of In-Project Variability. In Construction Research Congress 2016: Old and New Construction Technologies Converge in Historic San Juan—Proceedings of the 2016 Construction Research Congress, San Juan, Puerto Rico, 31 May–2 June 2016; ASCE Library: Reston, VA, USA, 2016; pp. 1998–2007. [Google Scholar] [CrossRef]
- Grau, D.; Abbaszadegan, A.; Assanair, R. Process versus operations workflow—Making the case for continuous monitoring of construction operations. In Proceedings of the 27th Annual Conference of the International Group for Lean Construction, IGLC 2019, Dublin, Ireland, 3–5 July 2019; pp. 563–572. [Google Scholar] [CrossRef]
- Van Brussel, H.; Wyns, J.; Valckenaers, P.; Bongaerts, L.; Peeters, P. Reference architecture for holonic manufacturing systems: PROSA. Comput. Ind. 1998, 37, 255–274. [Google Scholar] [CrossRef]
- Ma, H.; Zhang, H.; Chang, P. 4D-Based Workspace Conflict Detection in Prefabricated Building Constructions. J. Constr. Eng. Manag. 2020, 146, 04020112. [Google Scholar] [CrossRef]
- Kim, M.; Ji, S.; Jun, H. BIM-based file synchronization and permission management system for architectural design collaboration. J. Asian Archit. Build. Eng. 2017, 16, 511–518. [Google Scholar] [CrossRef]
- Redwood, J.; Thelning, S.; Elmualim, A.; Pullen, S. The Proliferation of ICT and Digital Technology Systems and their Influence on the Dynamic Capabilities of Construction Firms. Procedia Eng. 2017, 180, 804–811. [Google Scholar] [CrossRef]
- Dallasega, P.; Revolti, A.; Follini, C.; Schimanski, C.P.; Matt, D.T. BIM-based construction progress measurement of non-repetitive HVAC installation works. In Proceedings of the 27th Annual Conference of the International Group for Lean Construction, IGLC 2019, Dublin, Ireland, 3–5 July; pp. 819–830. [CrossRef]
- Hyun, B.; Choo, J.; Tommelein, I.D.; Member, A.; Ballard, G.; Zabelle, T.R. WorkPlan: Constraint-based database for work package scheduling. Engineering 1999, 125, 151–161. [Google Scholar]
- Koerckel, A.; Ballard, G. Return on investment in construction innovation—A lean construction case study. In Proceedings of the 13th International Group for Lean Construction Conference, Sydney, Australia, 19–21 July 2005; pp. 91–98. [Google Scholar]
- Sriprasert, E.; Dawood, N. Multi-constraint information management and visualisation for collaborative planning and control in construction. Electron. J. Inf. Technol. Constr. 2003, 8, 341–366. [Google Scholar]
- Schimanski, C.P.; Pradhan, N.L.; Chaltsev, D.; Pasetti Monizza, G.; Matt, D.T. Integrating BIM with Lean Construction approach: Functional requirements and production management software. Autom. Constr. 2021, 132, 103969. [Google Scholar] [CrossRef]
- Heigermoser, D.; García de Soto, B.; Abbott, E.L.S.; Chua, D.K.H. BIM-based Last Planner System tool for improving construction project management. Autom. Constr. 2019, 104, 246–254. [Google Scholar] [CrossRef]
- Lin, J.J.; Golparvar-Fard, M. Visual and Virtual Production Management System for Proactive Project Controls. J. Constr. Eng. Manag. 2021, 147, 1–17. [Google Scholar] [CrossRef]
- Ismail, A.; Scherer, R. Integration of Simulation Data For Construction Project Planning Using a Process-based Simulation Framework-(Best Paper Award) Mefisto View project wiSIB-A Simulation and Knowledge-Based System Identification Approach for Bridge Structures View project IN. In Proceedings of the 13th International Conference on Modeling and Applied Simulation- MAS, Bordeaux, France, 10–12 September 2014. [Google Scholar] [CrossRef]
- Ismail, A.; Srewil, Y.; Scherer, R.J. Integrated and collaborative process-based simulation framework for construction project planning. J. Simul. Process. Model. 2017, 12, 42–53. [Google Scholar] [CrossRef]
- Autodesk Inc. Autodesk BIM 360; Autodesk Inc.: San Francisco, CA, USA, 2024; Available online: https://www.autodesk.com/bim-360/ (accessed on 6 February 2024).
- Drees & Sommer. LCM Digital. Available online: https://lcmdigital.com/en/ (accessed on 6 February 2024).
- Bayhan, H.G.; Demirkesen, S.; Zhang, C.; Tezel, A. A lean construction and BIM interaction model for the construction industry. Prod. Plan. Control. 2021, 1–28. [Google Scholar] [CrossRef]
- Microsoft Microsoft Excel. 2024. Available online: https://www.microsoft.com/it-it/microsoft-365/excel?market=it (accessed on 6 February 2024).
- Bascoul, A.M.; Tommelein, I.D.; Douthett, D. Visual Management of Daily Construction Site Space Use. Front. Built Environ. 2020, 6, 139. [Google Scholar] [CrossRef]
- Francis, A. Chronographical Site-Spatial-Temporal Modeling of Construction Operations. Front. Built Environ. 2020, 6, 1–9. [Google Scholar] [CrossRef]
- Getuli, V.; Capone, P.; Bruttini, A.; Isaac, S. BIM-based immersive Virtual Reality for construction workspace planning: A safety-oriented approach. Autom. Constr. 2020, 114, 103160. [Google Scholar] [CrossRef]
- Kassem, M.; Dawood, N.; Chavada, R. Construction workspace management within an Industry Foundation Class-Compliant 4D tool. Autom. Constr. 2015, 52, 42–58. [Google Scholar] [CrossRef]
- Messi, L.; García de Soto, B.; Carbonari, A.; Naticchia, B. Spatial conflict simulator using game engine technology and Bayesian networks for workspace management. Autom. Constr. 2022, 144, 104596. [Google Scholar] [CrossRef]
- Chen, C.; Tang, L. BIM-based integrated management workflow design for schedule and cost planning of building fabric maintenance. Autom. Constr. 2019, 107, 102944. [Google Scholar] [CrossRef]
- Nechyporchuk, Y.; Bašková, R. The conformity of the tools of selected software programs for 4D building modeling. Iop Conf. Ser. Mater. Sci. Eng. 2020, 867, 012034. [Google Scholar] [CrossRef]
- SYNCHRO Construction. Using Synchro PRO for Workspace Clash Detection. 2015. Available online: https://www.youtube.com/watch?v=0hDcb9aeUPE&t=6s (accessed on 6 February 2024).
- Leveson, N. A new accident model for engineering safer systems. Saf. Sci. 2004, 42, 237–270. [Google Scholar] [CrossRef]
- Mansouri, M.; Gorod, A.; Sauser, B.; Gandhi, S.J. A systemic approach to adopting effective management styles based on typology of systems. In Proceedings of the 30th Annual National Conference of the American Society for Engineering Management, Springfield, MO, USA, 14–17 October 2009; American Society for Engineering Management (ASEM): Huntsville, AL, USA, 2009; pp. 588–596. [Google Scholar]
- Koestler, A. The Ghost in the Machine; The Macmillan Company: Hutchinson, KS, USA, 1967. [Google Scholar]
- Valckenaers, P.; Van Brussel, H. Design for the Unexpected: From Holonic Manufacturing Systems Towards a Humane Mechatronics Society; Butterworth-Heinemann: Oxford, UK, 2015; pp. 1–218. [Google Scholar] [CrossRef]
- Giret, A.; Botti, V. Holons and agents. J. Intell. Manuf. 2004, 15, 645–659. [Google Scholar] [CrossRef]
- Verstraete, P.; Saint Germain, B.; Hadeli, K.; Valckenaers, P.; Van Brussel, H. On applying the PROSA reference architecture in multi-agent manufacturing control applications. In Multi-Agent Systems and Software Architecture Special Track at Net. ObjectDays; Katholieke Universiteit Leuven: Heverlee, Belgium, 2006; pp. 31–47. [Google Scholar]
- Hirose, M.; Ischii, T.; Ikei, Y. Development of the Holonic Manipulator. Proc. Technol. 1986, 91–96. [Google Scholar]
- Hirose, M.; Ischii, T.; Ikei, Y.; Amari, H. Software environment for holonic manipulator. Adv. Flex. Autom. Robot. 1988, 1, 317–324. [Google Scholar]
- Hirose, M. Development of the holonic manipulator and its control. Proc. IEEE Conf. Decis. Control. 1990, 1, 91–96. [Google Scholar] [CrossRef]
- Babiceanu, R.F.; Chen, F.F. Development and applications of holonic manufacturing systems: A survey. J. Intell. Manuf. 2006, 17, 111–131. [Google Scholar] [CrossRef]
- Liu, S.; Gruver, W.A.; Kotak, D.; Bardi, S. Holonic manufacturing system for distributed control of automated guided vehicles. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, Nashville, TN, USA, 8–11 October 2000; Volume 3, pp. 1727–1732. [Google Scholar] [CrossRef]
- Brückner, S.; Wyns, J. Designing Agents for Manufacturing Control. 1998. Available online: https://aaai.org/papers/sigman98-006-designing-agents-for-manufacturing-control/ (accessed on 6 February 2024).
- Pascal, C.; Panescu, D. On rescheduling in holonic manufacturing systems. Comput. Ind. 2019, 104, 34–46. [Google Scholar] [CrossRef]
- Zekavat, P.R.; Moon, S.; Bernold, L.E. Holonic Construction Management: Unified Framework for ICT-Supported Process Control. J. Manag. Eng. 2015, 31, 1–15. [Google Scholar] [CrossRef]
- Naticchia, B.; Carbonari, A.; Vaccarini, M.; Giorgi, R. Holonic execution system for real-time construction management. Autom. Constr. 2019, 104, 179–196. [Google Scholar] [CrossRef]
- Amer, F.; Koh, H.Y.; Golparvar-Fard, M. Automated Methods and Systems for Construction Planning and Scheduling: Critical Review of Three Decades of Research. J. Constr. Eng. Manag. 2021, 147, 03121002. [Google Scholar] [CrossRef]
- Messi, L.; Spegni, F.; Carbonari, A.; Ridolfi, L.; Vaccarini, M. Process-based simulation models construction management at runtime using BPMN for construction management at runtime. In Proceedings of the CIBW78-LDAC Conference, Luxembourg, 11–15 October 2021. [Google Scholar]
- Naticchia, B.; Messi, L.; Carbonari, A. BIM-based Holonic System for Real-Time Pathfinding in Building Emergency Scenario. In Proceedings of the 2019 European Conference for Computing in Construction, Crete, Greece, 10–12 July 2019; Volume 1, pp. 117–124. [Google Scholar] [CrossRef]
- Gambardella, L.M.; Taillard, E.; Agazzi, G. MACS-VRPTW: A Multiple Ant Colony System for Vehicle Routing Problems with Time Windows. In New Ideas in Optimization Chapter 5; Corne, D., Dorigo, M., Glover, F., Eds.; McGraw-Hill: London, UK, 1999; pp. 1–17. [Google Scholar]
- IfcOpenShell Contributors. IfcOpenShell BIMserver Plugin. 2020. Available online: https://github.com/opensourceBIM/IfcOpenShell-BIMserver-plugin (accessed on 6 February 2024).
- The MathWorks Inc. MATLAB. 2024. Available online: https://it.mathworks.com/products/matlab.html (accessed on 6 February 2024).
- Microsoft Microsoft Project. 2024. Available online: https://www.microsoft.com/en-us/microsoft-365/project/project-management-software (accessed on 6 February 2024).
- Messi, L.; Carbonari, A. Data Repository about AWOPS Testing: Workplans Generated during AWOPS Tests. 2022. Available online: https://zenodo.org/records/6546630 (accessed on 6 February 2024).
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant System: Optimization by a Colony of Cooperating Agents. IEEE Trans. Syst. Man Cybern. Part B 1996, 26, 29–41. [Google Scholar]
- Rizzoli, A.E.; Montemanni, R.; Lucibello, E.; Gambardella, L.M. Ant colony optimization for real-world vehicle routing problems. Swarm Intell. 2007, 1, 135–151. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Day No. | Day Type | Action |
|---|---|---|---|
| 6 March 2022 | 0 | Non-working day | Generation of the baseline |
| 7 March 2022 | 1 | Working day | Beginning of work |
| 8 March 2022 | 2 | Working day | |
| 9 March 2022 | 3 | Working day | |
| 10 March 2022 | 4 | Working day | |
| 11 March 2022 | 5 | Working day | |
| 12 March 2022 | 6 | Non-working day | |
| 12 March 2022 | 7 | Non-working day | |
| 14 March 2022 | 8 | Working day | Update of work progress, replanning |
| 15 March 2022 | 9 | Working day | |
| 16 March 2022 | 10 | Working day | |
| 17 March 2022 | 11 | Working day | Update of work progress, replanning |
| 18 March 2022 | 12 | Working day | |
| 19 March 2022 | 13 | Non-working day | |
| 20 March 2022 | 14 | Non-working day | |
| 21 March 2022 | 15 | Working day | Update of work progress, replanning |
| 22 March 2022 | 16 | Working day | |
| 23 March 2022 | 17 | Working day | |
| 24 March 2022 | 18 | Working day | Update of work progress, replanning |
| 25 March 2022 | 19 | Working day | |
| 26 March 2022 | 20 | Non-working day | |
| 27 March 2022 | 21 | Non-working day | |
| 28 March 2022 | 22 | Working day | Update of work progress, replanning |
| 29 March 2022 | 23 | Working day | |
| 30 March 2022 | 24 | Working day | |
| 31 March 2022 | 25 | Working day | Update of work progress, replanning |
| 1 April 2022 | 26 | Working day | |
| 2 April 2022 | 27 | Non-working day | |
| 3 April 2022 | 28 | Non-working day | |
| 4 April 2022 | 29 | Working day | Update of work progress, replanning |
| 5 April 2022 | 30 | Working day | |
| 6 April 2022 | 31 | Working day | |
| 7 April 2022 | 32 | Working day | Update of work progress, replanning |
| 8 April 2022 | 33 | Working day | |
| 9 April 2022 | 34 | Non-working day | |
| 10 April 2022 | 35 | Non-working day | |
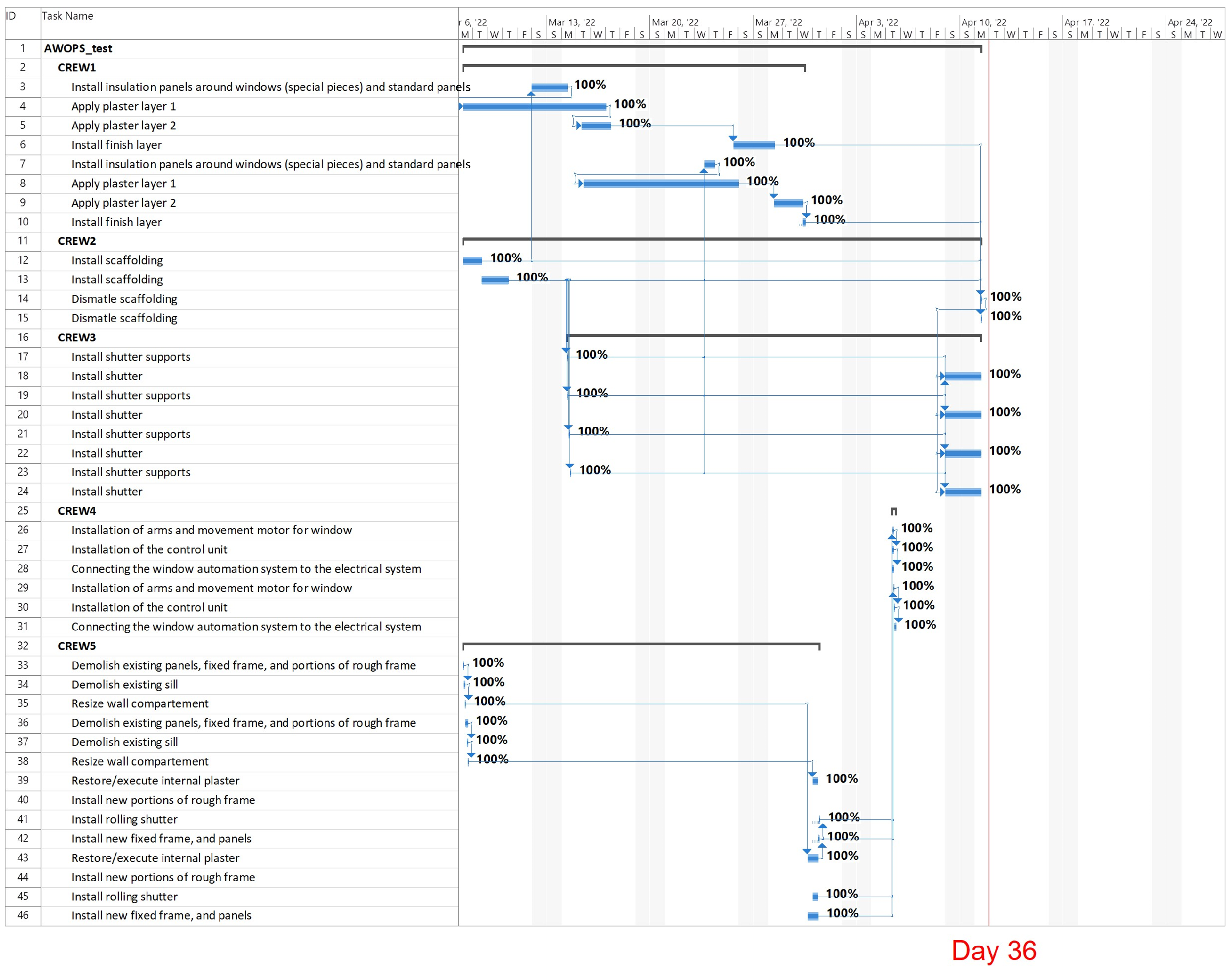
| 11 April 2022 | 36 | Working day | Update of work progress, end of work |
| ID | Name | Start Date/Time | Due Date/Time | Reason |
|---|---|---|---|---|
| 4 | Install insulation panels around windows (special pieces) and standard panels | 14 March 2022 | 31 December 2022 | Internal organization |
| 8 | Install insulation panels around windows (special pieces) and standard panels | 14 March 2022 | 31 December 2022 | Internal organization |
| 14 | Install shutter supports | 14 March 2022 | 31 December 2022 | Internal organization |
| 16 | Install shutter supports | 14 March 2022 | 31 December 2022 | Internal organization |
| 18 | Install shutter supports | 14 March 2022 | 31 December 2022 | Internal organization |
| 20 | Install shutter supports | 14 March 2022 | 31 December 2022 | Internal organization |
| 21 | Installation of arms and movement motor for windows | 14 March 2022 | 31 December 2022 | Internal organization |
| 24 | Installation of arms and movement motor for windows | 14 March 2022 | 31 December 2022 | Internal organization |
| 31 | Restore/put in internal plaster | 14 March 2022 | 31 December 2022 | Internal organization |
| 38 | Restore/put in internal plaster | 14 March 2022 | 31 December 2022 | Internal organization |
| Date | Day No. | Day Type | Potential Interferences No. | Involved Deliverables | Confirmed Interferences No. |
|---|---|---|---|---|---|
| ... | ... | ... | ... | ... | ... |
| 14 March 2022 | 8 | Working day | 2 | D1–D5, D2–D5 | 0 |
| 15 March 2022 | 9 | Working day | 3 | D2–D5, D3–D5, D2–D3 | 1 |
| 16 March 2022 | 10 | Working day | 2 | D4–D5, D3–D5 | 0 |
| 17 March 2022 | 11 | Working day | 1 | D4–D5 | 0 |
| ... | ... | ... | ... | ... | ... |
| ID | Name | Start Date/Time | Due Date/Time | Reason |
|---|---|---|---|---|
| 8 | Install insulation panels around windows (special pieces) and standard panels | 21 March 2022 | 31 December 2022 | Internal organization |
| 21 | Installation of arms and movement motor for windows | 14 March 2022 | 31 December 2022 | Internal organization |
| 24 | Installation of arms and movement motor for windows | 14 March 2022 | 31 December 2022 | Internal organization |
| 30 | Install new fixed frame, and panels | 18 March 2022 | 31 December 2022 | Truck drivers’ strike |
| 37 | Install new fixed frame, and panels | 18 March 2022 | 31 December 2022 | Truck drivers’ strike |
| 32 | Install rolling shutters | 18 March 2022 | 31 December 2022 | Truck drivers’ strike |
| 39 | Install rolling shutters | 18 March 2022 | 31 December 2022 | Truck drivers’ strike |
| ID | Name | Description | Unit | Value |
|---|---|---|---|---|
| A.1 | Process smoothness | How smooth is the pipeline to generate and download the schedule? | Likert (i.e., from 1 to 4) | 3 |
| A.2 | Cost tracking | Variation of the cost function values for the totality of works from the baseline | % | 0 (day 0) +3 (day 8) −13 (day 11) −11 (day 15) −9 (day 18) −17 (day 22) −19 (day 25) −20 (day 29) −20 (day 32) |
| B.1 | Clash fixing | Were crew leaders able to resize workspaces and solve clashes locally in the SCS? | Likert (i.e., from 1 to 4) | 1 |
| B.2 | Detectability of spatial conflicts | Ratio between the number of spatial conflicts detected by SCS and the maximum number of potential occurrences | % | 800 |
| B.3 | Work progress update | How easy is the update of work progress in the web service? | Likert (i.e., from 1 to 4) | 3 |
| B.4 | Work progress visualization | How informative is the visualization of the work progress in the web service? | Likert (i.e., from 1 to 4) | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Messi, L.; Carbonari, A.; Franco, C.; Spegni, F.; Vaccarini, M.; Naticchia, B. A Holonic Construction Management System for the Efficient Implementation of Building Energy Renovation Actions. Sustainability 2024, 16, 1824. https://doi.org/10.3390/su16051824
Messi L, Carbonari A, Franco C, Spegni F, Vaccarini M, Naticchia B. A Holonic Construction Management System for the Efficient Implementation of Building Energy Renovation Actions. Sustainability. 2024; 16(5):1824. https://doi.org/10.3390/su16051824
Chicago/Turabian StyleMessi, Leonardo, Alessandro Carbonari, Carlos Franco, Francesco Spegni, Massimo Vaccarini, and Berardo Naticchia. 2024. "A Holonic Construction Management System for the Efficient Implementation of Building Energy Renovation Actions" Sustainability 16, no. 5: 1824. https://doi.org/10.3390/su16051824